Collaboratieve robotica, mens-robot interactie (MRI) of mens-robot samenwerking (MRK) is een innovatief onderwerp op het gebied van robotica.
Bijna tien jaar geleden werd de technologie ontwikkeld en klaargemaakt voor serieproductie als onderdeel van een EU-onderzoeksprogramma, met de nadruk op de veiligheid van mens-robot interactie en de lichtgewicht constructie van dergelijke robots.
De commercialisering van de afgelopen jaren is aangestuurd door een andere aanbieder – destijds een nieuwkomer in robotica, met vereenvoudigde technologie, een start-up mentaliteit en moderne marketing. Er is een nieuwe, groeiende robotmarkt ontstaan, die frisse lucht inademt en de grote industriële robotfabrikanten oproept.
Succesfactoren waren hier de eenvoud van bediening (bediening en inbedrijfstelling) en de omgeving van een marketing- en informatiecultuur die is afgestemd op nieuwkomers in robotica. De resulterende optimistische geest heeft veel nieuwe gebruikers gemotiveerd om hun eerste stappen in de wereld van robotica te zetten, grip te krijgen op robottechnologie, robotapplicaties op een meer pragmatische en minder bevooroordeelde manier te benaderen en snel te genieten van een gevoel van voldoening. Sommige hiervan waren nieuwe toepassingen waarvoor conventionele robotica (zogenaamd) te omvangrijk, te inflexibel en te duur leek. Industriële gebruikers die in toenemende mate gebruik maken van deze eenvoudige technologie, hoopten het vermoeiende beschermende hek kwijt te raken dat ruimtevereisten en kosten genereert in conventionele robotcellen.
Er zijn nu ongeveer 30 fabrikanten van collaboratieve robots wereldwijd, meestal kleine robots met een nuttige lading tot 7 kg die zich richten op eenvoudige afhandelingstaken. Dit is een van de redenen waarom collaboratieve robotica belooft bijzonder kosteneffectief, flexibel en gemakkelijk te implementeren te zijn.
Collaboratieve robotica als een toekomstige technologie?
Collaboratieve robotica past ook in de canon van veelbesproken toekomstige technologieën. Robotica wordt algemeen beschouwd als een enabler van verschillende megatrends. Helaas wordt de term “robotica” vaak gebruikt – vooral in de marktrapporten van analisten – om zeer ongedifferentieerde beschrijvingen toe te passen op allerlei dingen die programmeerbaar zijn en die bewegen. Als gevolg daarvan hebben technologieën zoals industriële robots, service- en huishoudelijke robotica, sensor- en navigatietechnologie, kunstmatige intelligentie, exoskeletten, drones, stofzuigers en zelfrijdende logistieke platforms de neiging om samen te clusteren – en dit conglomeraat wordt gebruikt om enorme groeicijfers te voorspellen voor “robotica” in de toekomst. Collaboratieve robots worden gezien als de evolutionaire fase van conventionele robotica, omdat ze het ethisch waardevolle verzoenende vooruitzicht bieden dat mensen en robots niet langer concurrenten zullen zijn in de slimme digitale fabriek van de toekomst, maar in feite hand in hand zullen werken.
Dus zijn klassieke industriële robots in hun kooien een technologie van het verleden? Nee – collaboratieve robotica zal klassieke robotica niet vervangen, maar zal het aanvullen. De digitale fabriek met al zijn technologische concepten kan uitstekend worden geïmplementeerd met elke vorm van robotica, ongeacht of de robots samenwerken of niet.
Tegenwoordig wordt collaboratieve robotica gezien vanuit een meer down-to-earth, gedifferentieerd perspectief. Aanvankelijk werd de technologie van collaboratieve robots met grote belangstelling ontvangen. In de industriële omgeving (en vooral in de automobiel- en leveranciersindustrie) is technologisch scouting strategisch nagestreefd, met veel piloot- en vuurtorenprojecten. Na een nogal rotsachtige start en het leren implementeren van collaboratieve robotwerkstations op de harde manier, zijn mensen nu op zoek naar “echt nuttige toepassingen” als het gaat om collaboratieve robotica – d.w.z. toepassingen waarbij mens-robot interactie “echt” voordelen biedt. Het doel is niet langer om tegen elke prijs collaboratieve robotica te introduceren, maar om de juiste robotoplossing te vinden voor de juiste toepassing.
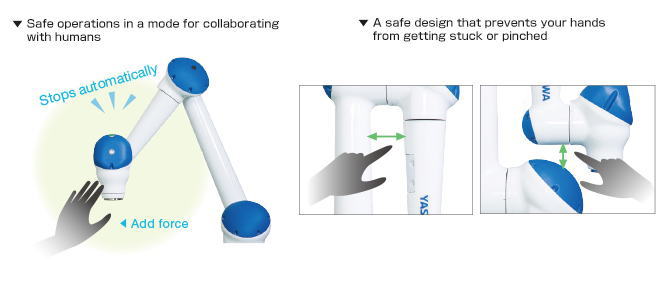
Veiligheid
De veiligheidsbeoordeling van robotwerkplekken werd bijvoorbeeld in het begin enorm onderschat. Inmiddels is het normenstelsel met DIN EN ISO 10218-1, ISO TS 15066 en DIN EN ISO 13849-1 aanzienlijk ontwikkeld – ook met betrekking tot veilige interactie tussen mens en robot. Vandaag praten we niet langer over een veilige robot, maar over een veilige toepassing.
Voor elke collaboratieve werkplek moet een individuele veiligheidsbeoordeling worden uitgevoerd – niet alleen de robot zelf, maar de hele werksituatie (positie, bewegingsrichtingen, snelheden, grijpers / gereedschappen, werkstukken, apparaat, veiligheidstechnologie) wordt in elk afzonderlijk geval beoordeeld door een gecertificeerde instantie. In veel gevallen moeten zelfs complexe botsingskrachtmetingen worden uitgevoerd. Het geld dat u eigenlijk op het beschermende hek verwachtte, wordt vaak snel elders uitgegeven … In de industrie is het bekend dat 80% van alle “samenwerkende” robots achter een veiligheidsvoorziening terechtkomen – in veel gevallen een beschermend hek .
Cyclustijd
Als een mens met de robot moet werken, ontstaat de volgende situatie vanuit het gezichtspunt van de robot: zolang de mens “in de weg” staat, moet de robot langzaam werken – met een veilig beperkte snelheid. Dit leidt tot korte cyclustijden en staat projectafschrijving vaak in de weg. Veel samenwerkende robotmodellen op de markt zijn zo klein en traag en kunnen zulke lage belastingen verplaatsen dat ze niet in staat zijn een risico voor de mens te vormen in termen van hun ontwerp. Het zijn geen industriële robots die zijn ontworpen voor jarenlang continu gebruik op maximale snelheid in 3-ploegendienst.
Maar hoe kan een robot veilig zijn en tegelijkertijd bijna net zo snel zijn als we bekend zijn met klassieke robotica? Het antwoord is de “hybride” collaboratieve robot – een volwaardige industriële robot die enerzijds op hoge snelheid kan werken, maar terugvalt naar een veilig gereduceerde snelheid zodra de mens zich direct in de werkruimte bevindt.
Wat hier belangrijk is, is hoe de periode van mens-robotinteractie wordt bepaald in relatie tot de totale cyclustijd tijdens de planning. Een dergelijke uitsplitsing naar tijdsfasen is ook bekend in de planning van klassieke robotsystemen waarbij deze zijn uitgerust met een veilige robotcontroller – dit type systeem kan ook zonder veiligheidshek werken. Het enige verschil is dat de klassieke industriële robot in een veilige positie moet blijven in aanwezigheid van mensen, terwijl de samenwerkende hybride robot langzaam en veilig blijft werken. Standaard veiligheidstechnologie wordt gebruikt om te detecteren of een persoon aanwezig is of niet (bijv. Veiligheidslaserscanner, veiligheidsgordijn, mat). Deze technologie is nodig in veel projecten – al dan niet met samenwerkende robots – om gevaren van armaturen, grijpers en werkstukken te onderscheppen. Het kan dus ook worden gebruikt om de robot in een andere modus te zetten.
Als zodanig is de evenredige periode van mens/robot-interactie in de totale cyclustijd essentieel bij het ontwerpen van een werkstation:
Permanente mens-robot interactie: als robots en mensen permanent samenwerken, als snelheid niet de belangrijkste factor is of als er nog steeds passagiersverkeer in de buurt van de robot is, kunnen samenwerkende robots het juiste concept zijn. Cyclustijden zijn hier geen primair doel, maar eerder synergie-effecten die worden bereikt door middel van slim parallel of samenwerkend werk tussen mensen en robots – b.v. voor assistentietaken of voor het verrijken van werkstukken tijdens handmatige montage. Dit ideeënstadium verder: er zijn ook situaties waarin de robotbeweging niet tegen elke prijs snel hoeft te worden uitgevoerd. Bij het laden/lossen van verwerkingsmachines of tijdens kwaliteitsinspectieprocessen, bijvoorbeeld – hier duurt de verwerkings- of inspectieprocedure soms zo lang dat de lagere snelheid van een samenwerkende robot wordt geaccepteerd tijdens de relatief korte laad-/losperiode om te kunnen doseren met een beschermend hek.
Tijdelijke mens-robot interactie: als er langere fasen zijn waarin mensen en robots samenwerken en andere fasen waarin mensen niet aanwezig zijn, zijn hybride collaboratieve robots een verstandige optie. Stations in het midden van passagiersverkeer met een onvoorspelbare frequentie en duur zijn ook van belang in verband met hybride robots.
Minimale interactie mens-robot: als de interactie mens-robot beperkt is tot een zeer korte periode (bijvoorbeeld bij het laden/lossen van werkstukken), zijn klassieke industriële robots meestal een verstandige optie. Ze stoppen wanneer de persoon aanwezig is, maar kunnen de rest van de tijd optimaal profiteren van hun snelheidsvoordeel. Met draai- of zwenktafels met meerdere stations kunnen invoegtijden vaak ook gunstiger worden ontkoppeld.
Plannability
Maar dingen zijn niet altijd zo eenvoudig: als de mens zich onvoorspelbaar in de werkruimte van de robot bevindt – soms voor een korte tijd en soms voor een lange tijd – hebben ze ook invloed op de cyclustijd van het robotstation. Dit maakt cyclustijd en gedeeltelijke doorvoer onvoorspelbaar. Hoe is het mogelijk om de output van de assemblagecel te plannen en bij te houden hoeveel onderdelen kunnen worden geproduceerd? Wat is de voorspelling? Met conventionele robotcellen kan dit eenvoudig worden berekend in de planningsfase.
Mens-robot interactie is moeilijker te plannen met conventionele planningsmethoden (vooral offline simulatie). MRK-capabele planningstools zijn nog in ontwikkeling. Het schatten van de toegankelijkheid is in de praktijk nog steeds vrij succesvol, maar het ontwerpen van interactie- en veiligheidsruimten rond systemen/robots/grijpers/apparaten is iets moeilijker. Cyclustijden kunnen alleen worden bepaald onder voorbehoud van algemene aannames. Als het werkstation eenmaal in bedrijf is, kan een statistische evaluatie van de tijdsaandelen input en feedback geven voor optimalisatie. Dit kan gemakkelijk worden gedaan met behulp van Industry 4.0-software (zoals Yaskawa Connected Factory).
Kosten
In vergelijking met de klassieke industriële robot is een collaboratieve robot niet goedkoper in aanschaf, althans als men realistisch rekening houdt met de payloads en de aanzienlijk hogere prestaties. Als men dan kosten toevoegt voor collaboratieve grijpers in plaats van eenvoudige kaakgrijpers, valvrij en letselvrij ontwerp van de apparaten, HMI-werkbegeleiding, toegangs- en veiligheidstechnologie en ten slotte de noodzakelijke veiligheidsbeoordeling door de operator met een risico op de mogelijke noodzaak voor herwerken, dan is de conclusie – in tegenstelling tot wat vaak wordt gedacht – duidelijk: een gezamenlijk robotwerkstation in de industrie is over het algemeen duurder dan een conventionele robotcel.
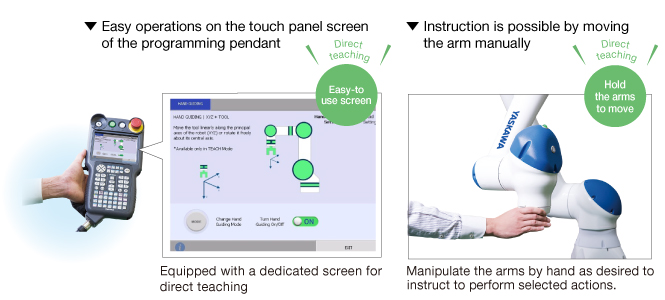
Eenvoudige bediening
Een groot voordeel van collaboratieve robottechnologie is hoe het de bediening, parametrering en programmering vereenvoudigt, in het bijzonder de intuïtieve handmatige begeleiding, maar ook het tabletachtige herontwerp van de robotbesturingseenheid (Smart Pendant) in vergelijking met de klassieke menugebaseerde of code handmatig bediend apparaat (Teach Pendant).
Elk van de drie technologieën heeft zijn voor- en nadelen: handmatige geleiding is goed voor frequente aanpassingen van eenvoudige pick and place-toepassingen – maar het is nauwelijks mogelijk om laserstralen of padprocessen op afstand tot honderdste millimeter met bevende handen aan te leren. De klassieke handheld-apparaten bieden volledige functionaliteit en zijn de eerste keuze voor ervaren robotprogrammeurs als de toepassing zelden opnieuw wordt geprogrammeerd en de volledige logica, functie en opdrachtbereik van de robotcontroller moet worden gebruikt. En een tablet-gebaseerde gebruikersinterface is een gelukkig medium voor de app-generatie. Elk van deze drie technologieën – en nog veel meer programmeringssystemen en hulpmiddelen – zijn nu ook beschikbaar voor klassieke industriële robots. Fabrikanten die zowel samenwerkende als klassieke robots in hun portfolio hebben, bieden alle technologieën als een optie voor alle robots.
Eenvoudige inbedrijfstelling en integratie
Unboxing video’s, e-Learning, veelgestelde vragen, how-to blogs, plug & play – dit alles is te vinden in de wereld van collaboratieve robotica, biedt basiskennis en vereenvoudigt inbedrijfstelling voor onervaren gebruikers en systeemintegrators. Helaas, en ondanks alles: heel weinig robotwerkplekken in de industrie kunnen eenvoudig worden “aangesloten” door onervaren mensen. Systeemintegrators en een expertkennis van robotfabrikanten zijn nog steeds nodig – in de toekomst mogelijk minder voor het solderen van de aansluitkabelstekkers dan voor competente conceptuele planning en overleg met betrekking tot de juiste robotoplossing voor de betreffende toepassing, rekening houdend met en anticiperend op de daaropvolgende veiligheidsbeoordeling criteria vanaf het begin.
Samenvatting
Collaborative robotics is een fascinerende nieuwe technologie voor toepassingen waarbij (echte) mens-robot interactie vereist is. Het opent een reeks nieuwe toepassingen waarvoor klassieke robotica voorheen te omvangrijk of oneconomisch was.
Toekomstige ontwikkelingen op het gebied van collaboratieve robots zullen gericht zijn op:
- Vergroting van de nuttige lading en het bereik van samenwerkende robots om ze te kunnen gebruiken in meer veeleisende toepassingen, die verlichting bieden voor mensen
- Verbetering van de bruikbaarheid van alle robotsystemen (al dan niet in samenwerking)
- Plug & play-ecosystemen ontwikkelen
- Verbetering van planningskwaliteit en tools met betrekking tot samenwerkingssystemen
- Modernisering van de robotgerelateerde “gebruikerservaring” Collaboratieve robotica zal klassieke robotica niet vervangen, maar zal het aanvullen. Het is een nieuw element in de toolbox van flexibele automatisering, dat in de eerste plaats technologieneutraal is, toegewijd aan een intelligente, geschikte en economische oplossing, en niet aan de onvoorwaardelijke implementatie van collaboratieve robottechnologie.
Geschreven door Dr. Michael Klos, General Manager Business Development bij YASKAWA Europe GmbH, Robotics Division.
Voor meer informatie contacteer onze robotics engineers via tel. +31 (0)315 25 72 60 of info@mcabv.nl