Geschreven door: Daniël Jonker
Dat een robot intelligentie bevat, is geen verrassing. Echter zit de intelligentie tegenwoordig niet meer alleen in de robot zelf of in het besturingssysteem, maar zeker ook in de grijpers. Door meervoudige functies in een grijper samen te voegen, wordt een slimme oplossing gerealiseerd. Hoe? We geven een voorbeeld:
Bij een pick en place robot willen we dat de grijper niet alleen diverse producten oppakt, maar ook emballage materiaal, die de robot op verschillende wijzen en afstanden neerlegt. En het liefst nog in een beperkte cyclustijd.
Met al deze extra functies in een grijper, is het belangrijk om ook rekening te houden met het gewicht van de grijper. Want hoe hoger de belasting, hoe krachtiger de robot moet zijn. De oplossing zit in het toevoegen van aluminium geleidingen in de robotgrijpers, iets wat tegenwoordig al op grote schaal wordt toegepast.
Welke lineaire geleiding in de robotgrijper?
Om te bepalen welke geleidingen er nodig zijn, kijken onze engineers naar het volledige plaatje. Hierbij stellen zij de volgende vragen, om daarna de juiste lineaire geleiding te kunnen toepassen:
- Is het een statische of dynamische belasting?
- Welk type lineair geleiding past het beste?
- Is er een laag of hoog profiel nodig?
- Welke aandrijving levert de juiste snelheid?
In onderstaand artikel leggen we uit waarom deze eigenschappen belangrijk zijn voor de juiste robotgrijpers.
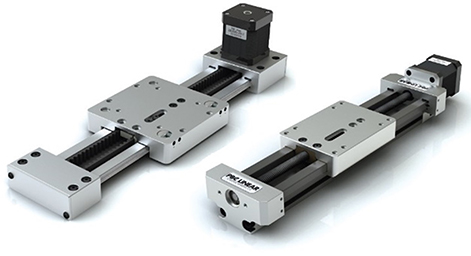
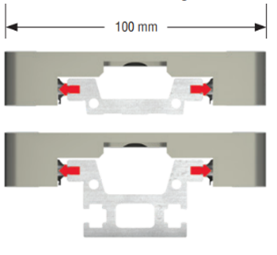
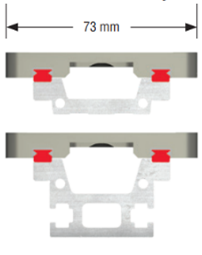
Op de foto: een lichtgewicht tandriem aangedreven lineair systeem met een laag profiel (links) en een L.G. spindel aangedreven lineair systeem met een hoog profiel (rechts).
Een statische of dynamische belasting?
Om te voldoen aan de diverse toepassingen (producten en materialen), is het goed om rekening te houden met de verschillende belastingen die een grijper aan moet kunnen: is het een statische of dynamische belasting?
Zo wordt er in veel robotgrijpers met zuignappen en pneumatische grijpers gewerkt. Hiermee kunnen de verschillende producten eenvoudig versteld worden. Voor de geleiding is deze drukkracht een statische belasting.
Maar wanneer één of meerdere producten moeten worden opgepakt, kan het ook zijn dat deze ten opzichte van elkaar versteld moeten worden. Dan hebben we het over een dynamische belasting voor de geleiding.
Welke type geleiding past het beste?
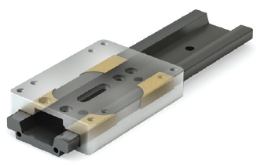
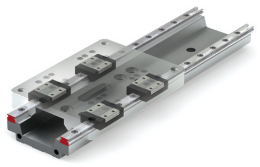
Wanneer kiest u voor een glijlagergeleiding, looprollengeleiding of profielrailgeleiding? Het antwoord hierop hangt af van de functie van de verstelling.
Meestal voldoet een glijlager bij een statische belasting met een lage inschakelduur. Voor een dynamische situatie met hoge inschakelduur, zal een looprollengeleiding in de meeste gevallen geschikt zijn. De uitvoering met profielrailgeleiding zit daar tussen in.
Om het eenvoudig voor u te maken, hebben we een overzicht opgesteld met de specificaties per geleiding.
| Type geleiding |
 |
 |
 |
|
Glijlagergeleiding |
Looprollengeleiding |
Profielrailgeleiding |
| Inschakelduur |
Laag |
Hoog |
Gemiddeld |
| Belasting statisch |
Max. 6000 N |
Max. 880 N |
Max. 3910 N |
| Belasting dynamisch |
Max. 6000 N |
Max. 880 N |
Max. 3910 N |
| Bewegingssnelheid |
4,2 m/s |
5,5 m/s |
3,0 m/s |
| Gewicht |
1,067/1,727* kg/m |
1,305/1,979* kg/m |
0,953/1,988* kg/m |
* UGA/UGT uitvoering, zie tabel verderop
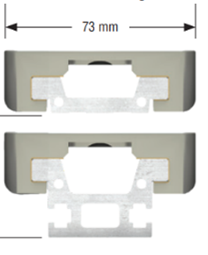
Laag of hoog profiel (UGA / UGT)
Als er meer stijfheid gevraagd wordt om doorbuiging te voorkomen, kunt u kiezen voor een verhoogd profiel (ook wel bekend als UGT). De inbouwhoogte neemt dan met 16 mm toe. Hierdoor is bijvoorbeeld geen ondersteunende constructie in de grijper nodig.
Spindel of tandriem

Voor de meeste verstellingen die de robot uit moet voeren, zal een standaard spindel voldoen. Echter is het goed om te kijken naar de overige functies die uitgevoerd moeten worden.
- Als de grijper voor een bepaalde maat product ingesteld moet worden, raden we een zelf-smerende PTFE-gecoate spindel met kunststof moer aan. Deze is namelijk spelingsvrij.
- Is er een hogere nauwkeurigheid of meer dynamische verstelling nodig? Kies dan voor een kogelomloopspindel.
- Moet de verstelling elke cyclus aangepast worden (bijvoorbeeld bij het spreiden van producten), is een door tandriem aangedreven systeem de beste optie.
Stappenmotor
Wanneer de beste keuze voor de aandrijving bepaald is, kijken we naar de stappenmotor. De lineair systemen worden aangedreven door stappenmotoren van het type NEMA 17 of NEMA 23. Deze zijn zeer geschikt voor robotgrijpers door de compacte afmetingen en lichte gewicht.
Hierbij maken we geen gebruik van reductoren (gewichtsbesparing) en drijven we de systemen direct aan.
Met onderstaand overzicht kunt u eenvoudig en snel de juiste geleiding bepalen.
|
Glijlagergeleiding |
Looprollengeleiding |
Profielrailgeleiding |
 |
 |
 |
 |
 |
B: Statisch
N: Standaard
V: Standaard |
B: Dynamisch
N: Gemiddeld
V: Standaard |
B: Dynamisch
N: Hoog
V: Standaard |
 |
B: Statisch
N: Standaard
V: Hoger |
B: Dynamisch
N: Gemiddeld
V: Hoger |
B: Dynamisch
N: Hoog
V: Hoger |
 |
B: Statisch
N: Standaard
V: Hoogst |
B: Dynamisch
N: Gemiddeld
V: Hoogst |
B: Dynamisch
N: Hoog
V: Hoogst |
Roze: goede keuze. Paars: is mogelijk. Grijs: is geen logische keuze.
B: belastbaarheid van de geleiding, N: nauwkeurigheid van het systeem, V: snelheid van de beweging. |
Combineren van technische kennis brengt oplossingen
Bij MCA combineren we onze technische kennis in de lineair-, aandrijf- en besturingstechniek. Met de uitgebreide kennis van onze engineers, willen we u de juiste totaaloplossingen bieden.
Wilt u meer informatie over de genoemde producten uit dit artikel? Kijk dan eens hier:
Heeft u nog vragen of kunnen we verder iets voor u betekenen? Neem dan vrijblijvend contact op via +31 (0)571 27 20 10 of de e-mail.
Vond u dit interessant?
Schrijf u dan nu in voor onze nieuwsbrief en ontvang altijd als eerste de nieuwste technische ontwikkelingen en voorraden in uw e-mail. Mis het niet.

